Фильтр огибающей и автокорреляционная
функция.
1 Подготовка данных для исследования
Фильтр огибающей и автокорреляционная
функция.
Отделение сигнала от сопровождающих
его шумов является задачей фильтрации.
Главной идеей обосновывающей этот метод является то, что в большинстве
случаях истинный сигнал, т.е. информативный искомый сигнал, является
низкочастотным. Шумовые помехи, на
которых искомый сигнал накладывается, являются высокочастотными. (Примерами
таких сигналов могут быть сигналы, которые используют в пьезоэлектрических
толщиномерах.) Поэтому за информационные точки берутся максимумы или минимумы
данного сигнала.
Чтобы сохранить размерность и вид
самого сигнала, за место точек, которые располагаются между двух близ лежащих
максимумов, вставляются точки, рассчитанные с помощью метода интерполяции. Так
как первая и последняя точка не попадают
под определение максимумов, в виде исключения оставляем их в качестве первого и
локального последнего максимума соответственно.
Одной из важных задач с
точки зрения обеспечения безопасной и экономически эффективной работы АЭС с
реакторами канального типа является контроль геометрических параметров
технологических каналов (ТК).
Геометрические параметры
измеряются с помощью пьезоэлектрических датчиков. Датчики, как правило,
работают по принципу измерения времени t распространения ультразвукового импульса
в изделии от поверхности ввода УЗК до донной поверхности и обратно. Действие
импульсных толщиномеров может быть основано на измерении частоты повторения
многократно отраженных в изделии импульсов УЗК.
Посредством быстродействующего АЦП ответный сигнал
преобразуется в цифровую форму и хранится в памяти. Ответный сигнал
представляет собой не единичный отклик, а серию затухающих по амплитуде
откликов (3-6). В реальной ситуации они будут отличаться друг от друга, что
даст информацию о разработке измерений величины, которая не может быть получена
при других методах.
В реальных данных,
полученных от вышеописанной системы, на фоне высокочастотной составляющей
прослеживаются низкочастотные биения (рис.1.). Чтобы вычислить периодичность
этих биений, нам нужно очистить данные от высокочастотной составляющей, т.е. отфильтровать эти данные. Затем чтобы
вычислить период низкочастотных колебаний, надо воспользоваться
автокорреляционной функцией.
1 Подготовка данных
для исследования
Данные первоначально были
записаны в текстовый файл. Чтобы данные можно было обработать надлежащим
образом, их надо импортировать в сессию А+.
Данные с текстового файла, с помощью ниже показанной функции,
записываются в локальную переменную.
txt2a file:{ xûsys.readmat{file}; (((`char©13)=@1x)/@1x)û'
'; â@1x}
Пример 1
: data1ûTxt2a {‘data1.txt’}
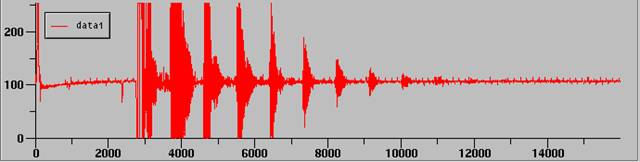
Рисунок 1. (а). Данные, полученные с
датчика 1.
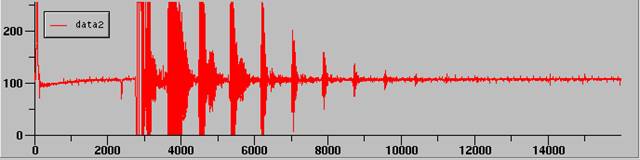
Рисунок 1. (б). Данные, полученные с
датчика 2.
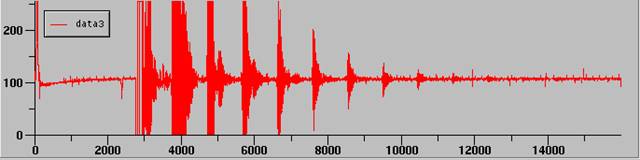
Рисунок 1. (в). Данные, полученные с
датчика 3.
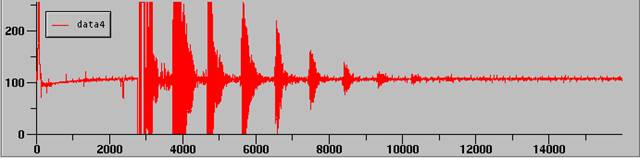
Рисунок 1. (г). Данные, полученные с
датчика 4.
2 Функция фильтра
огибающей.
Данная функция работает по
следующему принципу: В первых, из полученных данных, берутся значения локальных
максимумов. Во вторых, считается число точек между максимальными значениями. В
третьих, для точек, найденных на втором шаге,
находятся значения с помощью функции интерполяции. Эти значения должны лежать на одной прямой,
соединяющей два близко лежавших локальных максимума.
Lmax X:{
ã Lmax
- function of local maximum
ã X- time series
1÷1 1,¢2Õ((1÷X)>X)^(1÷X)>2÷X}
Inter {Y;X}:{
ã Inter- function
interpolation for filter
ã Y- coordinate and maximum time series t
ã X- coordinate of maximum
time series t
YYû(1ÕY)-¢1ÕY;
XXû(1ÕX)-¢1ÕX;
(Z;D)û(É0;É0);
while (1<ÒY){
RûÉ1ÙXX;
Zû(1ÙY)+((R+1ÙX)-1ÙX)«(1ÙYY)ß1ÙXX;
(X;Y;XX;YY)û1Õ¡(X;Y;XX;YY);
DûD,Z};
DûD,Y}
Filter T:{
ã T- time series
MaxûLmax T;
YûMax/T;
XûMax/ÉÒT;
ZûY Inter X}
Пример 2: Filter1ûFilter data1
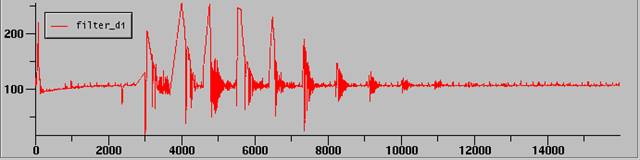
Рисунок 2. (а). Отфильтрованные
значения датчика 1.
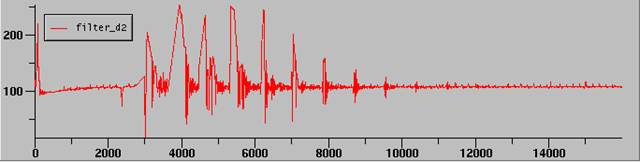
Рисунок 2. (б). Отфильтрованные
значения датчика 2.
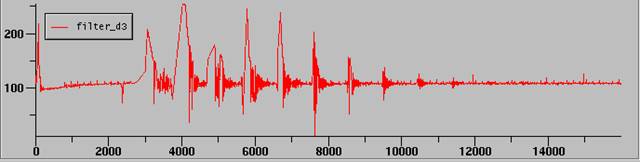
Рисунок 2. (в). Отфильтрованные
значения датчика 3.
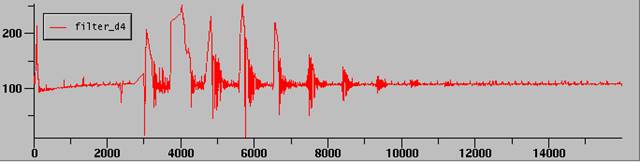
Рисунок 2. (г). Отфильтрованные значения датчика 4.
3 Автокорреляционная функция.
Автокорреляционная функция описывает
внутреннюю память случайного процесса. С помощью этой функции можно найти
периодичность биения. Значения, которые получились после фильтрации начальных
данных, мы подставим в функцию Автокорреляции. Входными параметрами для этой
функции являются не только отфильтрованные значения, но и число временных
задержек, которое не может быть больше, чем количество подставляемых
отфильтрованных значений (их всего в данном случае 16000).
Пример
3: corr1ûCORF {15990;filter1}
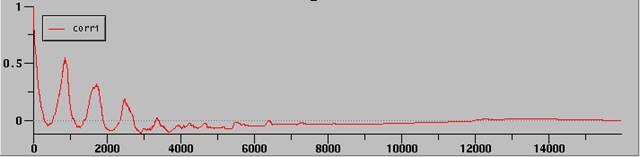
Рисунок 3. (а). Автокорреляционная функция для датчика 1.
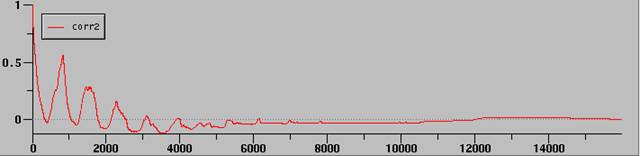
Рисунок 3. (б). Автокорреляционная функция для датчика 2.
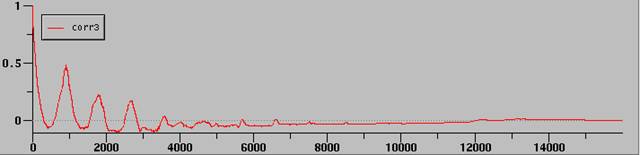
Рисунок 3. (в). Автокорреляционная функция для датчика 3.
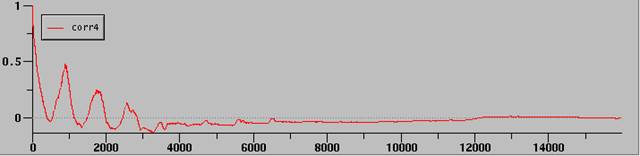
Рисунок 3. (г). Автокорреляционная функция для датчика 4.
Если над полученными
значениями применить автокорреляционную функцию, то можно получить более
удобные значения для вычисления периода колебания. Графическая реализация этих
значений получена на рисунке 4.
Пример 4: corr11ûCORF {15990; corr1}
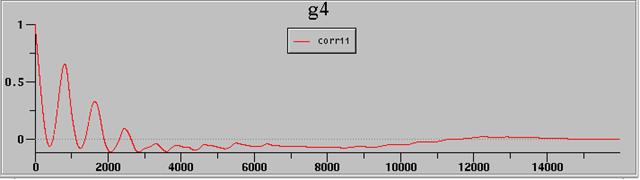
Рисунок 4. (а). Двойное применение автокорреляционной функции для датчика 1.
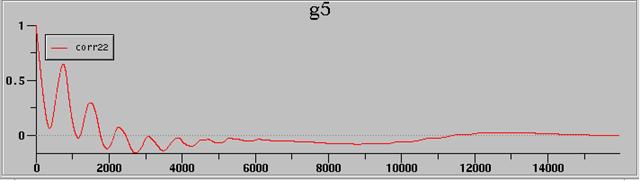
Рисунок 4. (б). Двойное применение автокорреляционной функции для датчика 2.
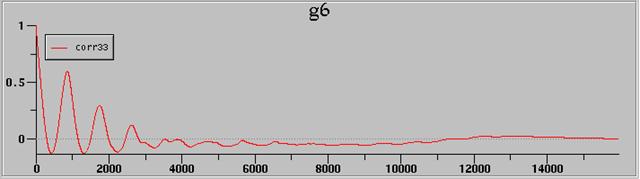
Рисунок 4. (в). Двойное применение автокорреляционной функции для датчика 1.
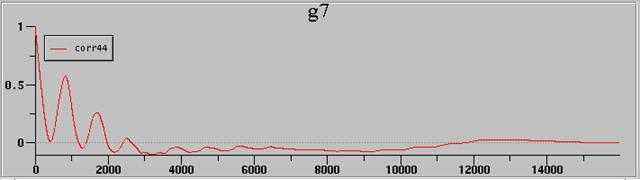
Рисунок 4. (г). Двойное применение автокорреляционной функции для датчика 4.
4 Вычисление периода
биения.
Чтобы вычислить период биения,
необходимо найти время появления первого локального максимума автокорреляционной
функции. Как показано на рисунке 5. Для нахождения этого максимума
воспользуемся функцией Lmax (п.3.2.2.).
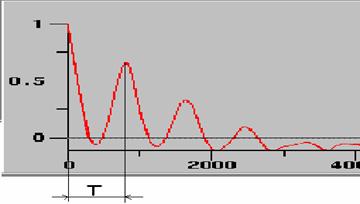
Рисунок 5.
Пример нахождения периода биения.
Чтобы узнать период биений
сразу для всех 4 датчиков, надо
выполнить пример 5.
Пример5: 1Ù¡ (Lmax¡
X)/ É¡Ò¡Xû{corr11;corr22;corr33;corr44}
817 747 867 824
Т.е. можно сделать вывод, что периоды биения составляют : Т1=817; Т2=747; T3=867; T4=824;